十字路口交通灯控制系统的设计与仿真
课程设计目的
- 使学生更好地巩固和加深对基础知识的理解,学会设计简单数字系统的方法,独立完成调试过程,增强学生理论联系实际的能力,提高学生电路设计和分析的能力。
- 通过实践教学引导学生在理论指导下有所创新,为后继专业课的学习和日后工程实践奠定基础。
开发工具选择
本次课程设计使用软件Quartus 13.0 sp1完成。本次课程设计将采用模块化设计方法,底层的元件使用硬件描述语言VHDL进行描述,顶层采用原理图的方法。依靠计算机,借助Quartus,实现系统功能。
设计方案
需求分析
需求
- 十字路口由一条东西方向的主干道和南北方向的支干道构成。东西南北4个方向各装1个车辆传感器。
- 通常保持主干道绿灯、支干道红灯。只有支干道有车时,才转为主干道红灯,支干道绿灯。
- 绿灯转红灯过程中,先由绿灯转为黄灯,5s后再由黄灯转为红灯;同时对方才由红灯转为绿灯。
- 当两个方向同时有车时,红绿灯每隔30s变换一次,应扣除绿灯转红灯过程中有5s黄灯过渡,绿灯实际只亮25s。
- 若仅一个方向有车时,处理方法为:
- 该方向原来为红灯时,另一个方向立即由绿灯变为黄灯,5s后 再由黄灯变为红灯,同时本方向由红灯变为绿灯。
- 该方向原为绿灯时,继续保持绿灯。另一个方向有车来时,作两个方向均有车处理。
分析
逻辑符号:
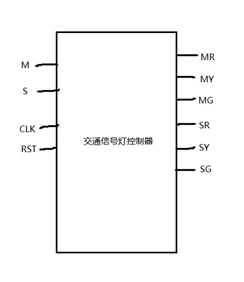
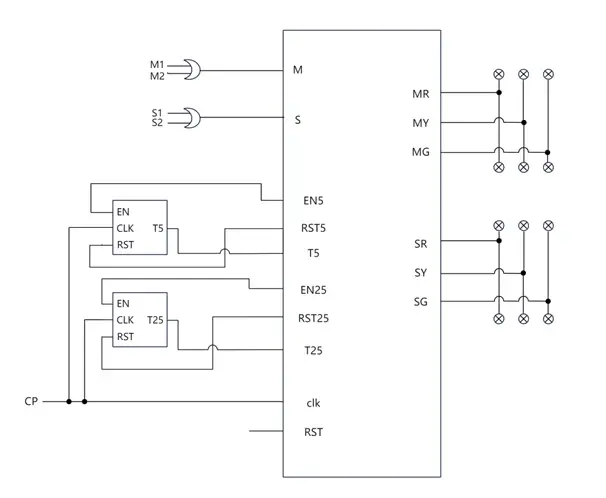
- 定义主干道(东西两侧)的绿灯黄灯红灯分别为MG1、MY1、MR1,MG2、MY2、MR2(其中东侧灯代号末尾为1,西侧灯为2),支干道(南北两侧)的绿灯黄灯红灯分别为SG1、SY1、SR1,SG2、SY2、SR2(其中东侧灯代号末尾为1,西侧灯为2),定义高电平亮,低电平灭。因为道路东西两侧或南北两侧变化相同,因此可以直接由同一个信号进行控制。这里定义控制东西两侧灯的三个信号为MG、MY、MR,控制南北两侧灯的三个信号为SG、SY、SR。信号为0时对应灯灭,信号为1时对应灯亮。
- 东西南北4个方向各装1个车辆传感器(这里定义有车时输出高电平,无车时输出低电平),主干道(东西两侧)两个传感器分别用M1,M2表示,支干道(南北两侧)两个传感器分别用S1,S2表示。当M1或M2任意一个为1时,代表主干道有车;当S1或S2任意一个为1时,代表支干道有车。这里定义M=M1+M2,S=S1+S2。
- 定义信号MK,表示该时刻是否应该由主干道切换为支干道,为1时应该切换。
- 定义信号SK,表示该时刻是否应该由支干道切换为主干道,为1时应该切换。
模块划分
- 5秒定时器
- 25秒定时器
- 控制模块(运行主程序)
主要模块设计
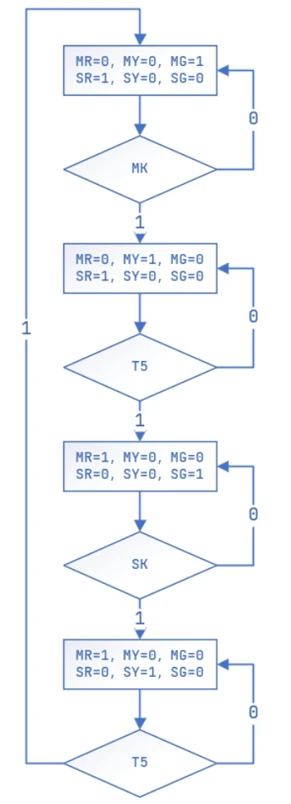
控制模块的几个状态
- 开始时,进入状态1:主干道绿灯亮(MG=1,MY=MR=0),支干道红灯亮(SR=1,SY=SG=0),并开启25秒定时器。
- 在状态1时判断MK状态,为0时保持状态1,为1时进入状态2:主干道黄灯亮(MY=1,MG=MR=0),支干道红灯亮(SR=1,SY=SG=0),并开启5秒定时器。
- 5秒定时器结束后,进入状态3:主干道红灯亮(MR=1,MY=MG=0),支干道绿灯亮(SG=1,SY=SR=0),并开启25秒定时器
- 在状态3时判断SK状态,为0时保持状态3,为1时进入状态4:主干道红灯亮(MR=1,MY=MG=0),支干道黄灯亮(SY=1,SG=SR=0),并开启5秒定时器。
- 5秒定时器结束后回到状态1。
MK和SK
根据上述需求分析可知,当仅支干道方向有车($\overline{M}S = 1$)或两个方向同时有车且到达绿灯的25秒限制($MS*T_{25} = 1$)时,MK=1。
当两个方向均无车($\overline{M}*\overline{S} = 1$),仅主干道方向有车($\overline{S}*M = 1$)或两个方向同时有车且到达绿灯的25秒限制($MST_{25} = 1$)时,SK=1。
ASM图
具体实现
计数器
25秒正计数器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.NUMERIC_STD.ALL;
entity T25 is
Port (
enable : in STD_LOGIC;
clk : in STD_LOGIC;
reset : in STD_LOGIC;
timeout : out STD_LOGIC
);
end T25;
architecture Behavioral of T25 is
constant CLK_FREQUENCY : integer := 1; -- 输入时钟频率
constant TARGET_TIME : integer := 25 * CLK_FREQUENCY;
-- 目标时间 = 时间个数 × 时钟频率
signal count : unsigned(31 downto 0); -- 计数器信号
begin
process(clk, reset)
begin
if reset = '1' then
count <= (others => '0'); -- 复位计数器
timeout <= '0';
elsif rising_edge(clk) then
if enable = '1' then
if count = TARGET_TIME - 1 then -- 达到目标时间
timeout <= '1';
count <= (others => '0'); -- 复位计数器
else
count <= count + 1; -- 递增计数器
timeout <= '0';
end if;
end if;
end if;
end process;
end Behavioral;5秒正计数器
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.NUMERIC_STD.ALL;
entity T5 is
Port (
enable : in STD_LOGIC;
clk : in STD_LOGIC;
reset : in STD_LOGIC;
timeout : out STD_LOGIC
);
end T5;
architecture Behavioral of T5 is
constant CLK_FREQUENCY : integer := 1; -- 输入时钟频率
constant TARGET_TIME : integer := 5 * CLK_FREQUENCY;
-- 目标时间 = 时间个数 × 时钟频率
signal count : unsigned(31 downto 0); -- 计数器信号
begin
process(clk, reset)
begin
if reset = '1' then
count <= (others => '0'); -- 复位计数器
timeout <= '0';
elsif rising_edge(clk) then
if enable = '1' then
if count = TARGET_TIME - 1 then -- 达到目标时间
timeout <= '1';
count <= (others => '0'); -- 复位计数器
else
count <= count + 1; -- 递增计数器
timeout <= '0';
end if;
end if;
end if;
end process;
end Behavioral;
控制部件
这里采用Moore型状态机。
1 | library ieee; |
系统构成

调试仿真
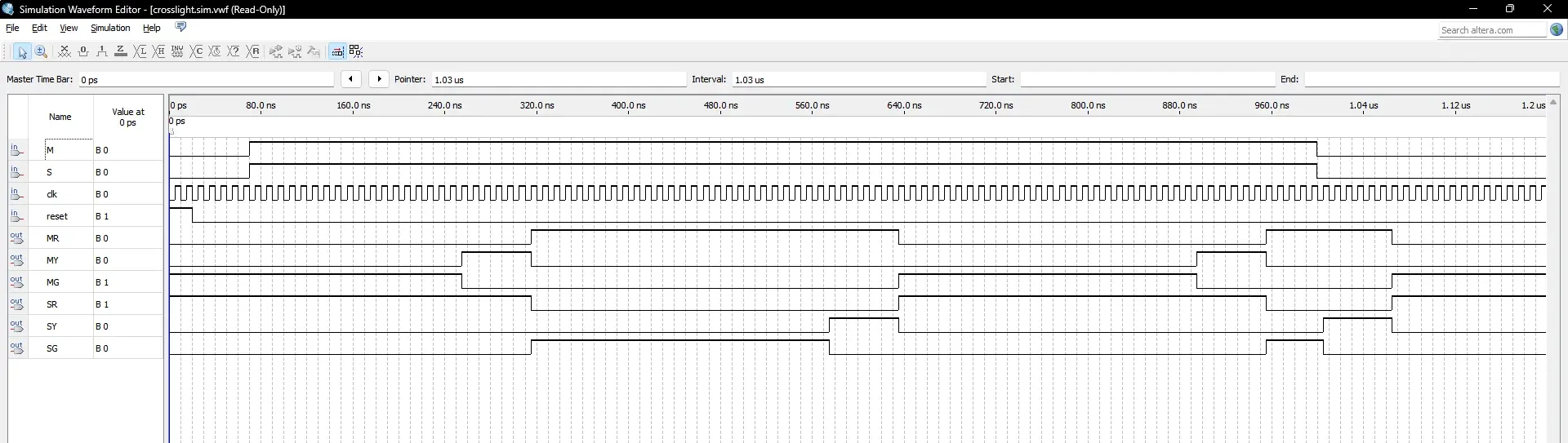
上图是一种仿真模拟情况:模拟两端均有车时交通灯的切换效果,可以看到上文设计成功完成主绿支红-主黄支红-主红支绿-主红支黄的循环。
课程设计回顾总结
经过一星期的努力,我最终完成了十字路口交通灯控制系统的设计与仿真,较好地完成了需求。
本次设计采用层次结构,模块化设计 。经历了完整的需求分析-模块划分-绘制ASM图-代码设计-代码实现-测试仿真的开发流程,是我接触数字逻辑以来的最大项目。
本次设计充满了挑战:无论是需求分析时对于主支干道切换的逻辑分析,还是具体实现时对于状态机语句顺序的写法,还是绘制电路图并用其编译,都是困难和新鲜的。但同时它们也是机遇:正因我坚持解决了这些问题,我才能够更好地理解数字逻辑和VHDL语言,以及Quartus软件的使用方式方法。
总的来说这是一次难忘的、宝贵的经历。这次设计不仅提升了我的专业知识和技能理解,还培养我的创新精神和解决生活中的实际问题的能力,同时也让我明白:只要目标清晰、坚持不懈,没有什么解决不了的问题。
参考文献
[1]盛建伦编著. 数字逻辑与VHDL逻辑设计(第2版)[M]. 北京:清华大学出版社, 2016.01.
